On peut classer les différents types de machines en trois grandes familles :
|
1) Machines type Draper / Hindle : C’est l’ancêtre des machines dont le principe général semble avoir été mis au point par Huygens vers 1738 puis amélioré par Lord Rosse puis par Henry Draper, un astronome américain. Elle est constituée des parties suivantes (voir figure A) :
|
Survoler certaines vignettes pour lancer les animations :
|
||||||||||||||||
|
Ce concept général a été modifié et amélioré au fil du temps : |
|||||||||||||||||
|
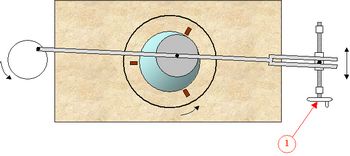
Ritchey a rajouté un réglage latéral (1) du guide « coulisse » du bras permettant son déport axial ainsi que celui des courses (voir figure B) : |
|
||||||||||||||||
|
Une seconde bielle (ou excentrique) a été rajoutée en remplacement de la coulisse fixe permettant ainsi une plus grande variété de courses (voir figure C) : |
|
||||||||||||||||
|
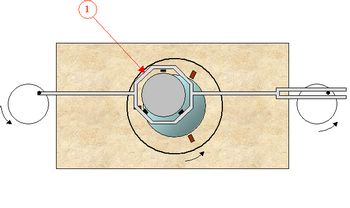
Variante type Hindle : Hindle, quant à lui, a remplacé le doigt d’entraînement par un cadre (1) (appelé crocodile) maintenant le disque sur sa tranche. Ce dispositif autorise ainsi la position miroir dessus impossible avec le modèle Draper. Il permet également de dégager plus facilement le disque supérieur et de le lester au besoin par des poids disposés sur son dos (voir figure D) : |
|
||||||||||||||||
|
Variante type Draper déportée : Le bras d’entraînement principal (1) a été déporté de la table. Un second bras relevable (2)‚ fixé au premier permet l’entraînement du disque supérieur et sa longueur est généralement réglable (voir Figure E) : |
|
||||||||||||||||
|
2) Machines type Elgin / Waineo : Ce type de machine est certainement le plus couramment rencontré aujourd’hui dans l’industrie et chez les amateurs, notamment ceux d’outre-atlantique (voir figure F). Il se différencie du modèle précédent par son bras déporté unique (1) animé d’un mouvement d’oscillation autour d’un axe (2) ‚ généré par un simple excentrique (3) relié à un vilebrequin (4). Ce bras est de longueur réglable. Une variante célèbre à cette machine a été proposée par l’amateur et opticien américain Tom Waineo dans la revue Sky and Telescope en novembre 1995. Le principal inconvénient de cette machine est le manque de variété de son mouvement à simple excentrique. Toutefois, parmi ses utilisateurs les plus expérimentés, certains arrivent à compenser ce handicap au prix de déréglages fréquents et d’une habileté sans égal : on peut notamment citer Carl Zambuto qui est passé maître en la matière. |
|
||||||||||||||||
|
3) Machines type Zeiss : Développée par la célèbre firme de l’ex Allemagne de l’Est, cette machine ressemble beaucoup au type Hindle déporté (voir figure G). Elle comporte également deux excentriques mais chacun des bras (1) et (2) est directement relié au doigt d’entraînement du polissoir lui conférant ainsi un mouvement un peu différent de sa demi-sœur. L’un de ses bras (ici le 1) est généralement réglable en longueur.
|
|
||||||||||||||||
|
Les principaux avantages et inconvénients de chaque type de machine sont synthétisés ci-dessous |
|||||||||||||||||
|
|||||||||||||||||